Actionneur haute vitesse connecté aux Microgrids (ActiMic)
Introduction :
Ce projet, porté par le GREEN, est issue d’une collaboration entre le GREEN et le LEMTA. Il se positionne sur la thématique du pilotage des machines synchrones à aimants permanents (MSAP) à haute vitesse de rotation pour les applications embarquées, lorsqu’elles sont connectées à un microgrid DC. Il repose sur une complémentarité entre les deux équipes de recherche impliquées dans ce projet :
La thématique « pilotage des moteurs à haute vitesse » pour les différentes applications industrielles, c’est le domaine de la recherche du GREEN,
La thématique « microgrid embarqué » utilisé dans les applications avioniques, les trains et les véhicules électriques est déjà bien développé et étudié au LEMTA.
Objectif :
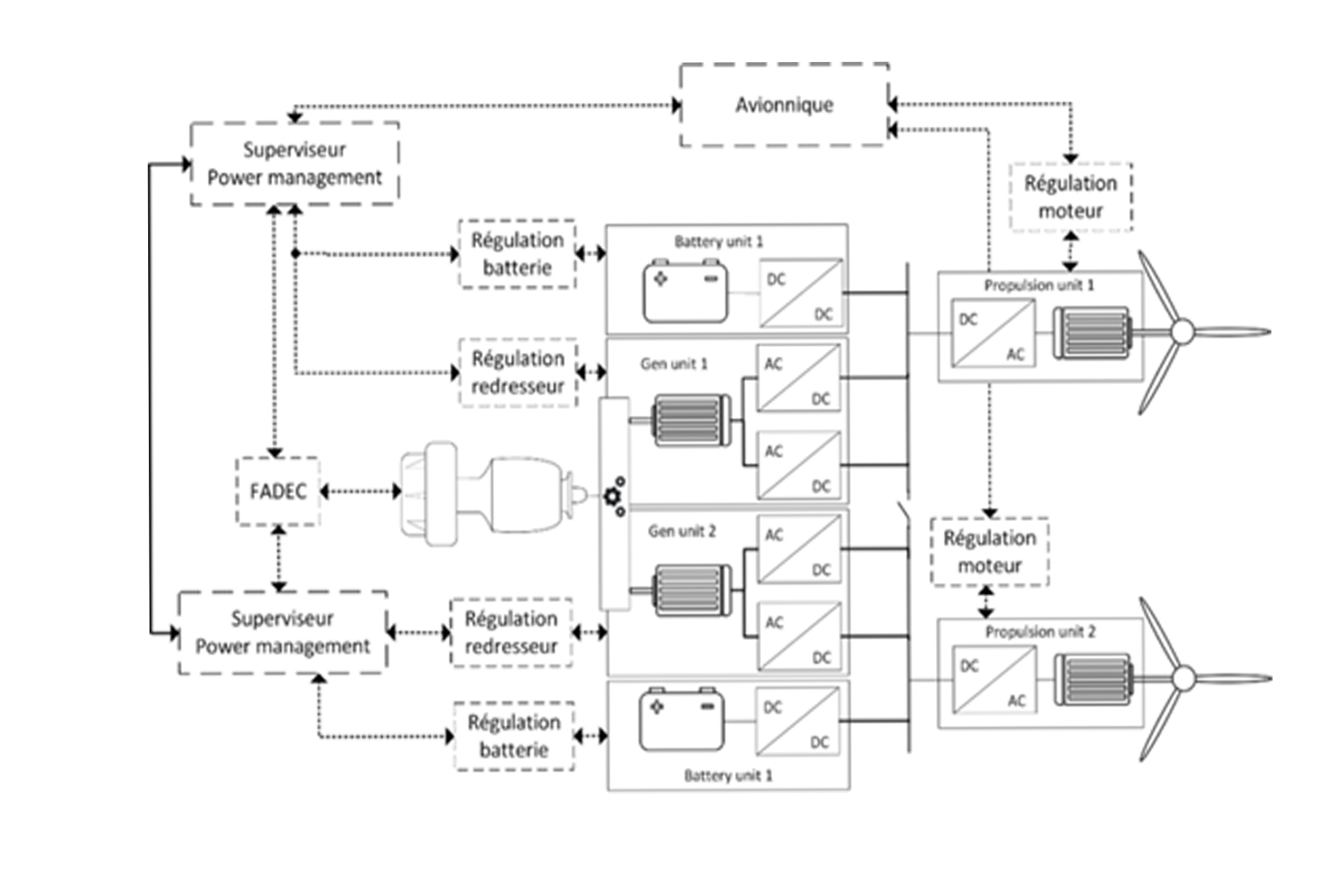
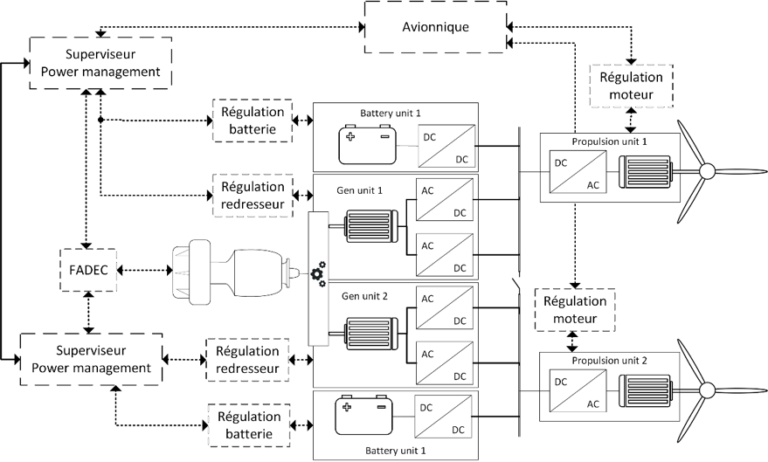
L’objectif de ce projet est d’une part d’introduire une commande sans capteur de position à l'aide d'un nouvel observateur d'état et d’autre part de garantir, via un pilotage spécifique, que le système connecté au microgrid ne sera pas à l’origine d’instabilités. Une première étude analytique portera sur la convergence de l’algorithme "sans capteur" ainsi que sa robustesse paramétrique. Une seconde étude portera sur le comportement dynamique du système lorsqu’il est connecté à un microgrid DC, de puissance limitée. Les différents résultats théoriques obtenus seront validés expérimentalement sur la plateforme microgrid multi-vecteurs du LEMTA.
Problématique scientifique :
Cette thématique est d’un fort intérêt académique et industriel sachant que dans les applications embarquées à forte densité de puissance, pour les machines à haute vitesses la fréquence électrique devient importante (actionneur à forte densité massique de puissance) et l’utilisation de capteur de position entraine, à la suite de leur traitement numérique, un retard préjudiciable à l’application et à la transmission de puissance. D'autre part, la stabilité dynamique de l'ensemble onduleur-MSAP haute vitesse, même en cas de fortes perturbations et sans connaître, a priori, la configuration du réseau d'alimentation, doit être garantie par la loi de commande associée à la stratégie d'alimentation sans capteurs mécaniques.
Contact :
Ehsan JAMSHIDPOUR : Ehsan.jamshidpour@univ-lorraine.fr